
Faculty:
Dr. Chang Duan
Tel: (936) 261-9954
Email: chduan@pvamu.edu
Research Interest:
Robust Control, Hybrid Systems, Mechatronics and Robotics
Research Activities:
1. Analysis and Control of Hybrid Dynamical System with constraints
Hybrid system is a dynamic system that exhibits both continuous and discrete dynamic behavior (Fig. 1). There are many man-made dynamical systems that exhibit such behavior. For example, an automotive system often combines continuous dynamics such as differential or difference equations describing the physical and mechanical part with discrete dynamics such as finite-state machines describing the software and logical behavior. The rich dynamical behavior and phenomena of hybrid systems bring challenges to stability analysis and robust control design for such systems. One critical aspect in control of any dynamical system is taking constraints into consideration. And the constraints can take various forms. It could be operating constraints, such as actuator saturations, time delay in inputs or states, dwell time constraints (how long the states remains continuous before they jump), etc. It could also be performance specifications such as constraints on the state trajectory. There are many open problems that motivate this particular research activity.
Fig.1 Hybrid system
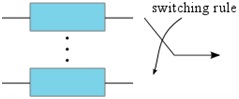 Fig.2 Switched system — a sub-class of Hybrid system
Fig.2 Switched system — a sub-class of Hybrid system
2. Experimental platform for validation and verification
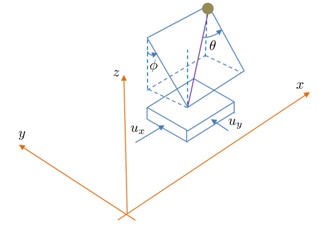
Fig.3 Spherical Inverted Pendulum
As shown in Fig.3, spherical inverted pendulum is a rod attached to a movable base through a universal joint. It is a widely used example to test advanced control strategies and is also a reasonable model for rocket propelled body. In the literature, various control methodologies have been investigated to stabilize the spherical inverted pendulum at its upright unstable equilibrium. All of them treated the movable base as a point mass that can be propelled along arbitrary planar direction. When a more challenging situation is considered, where at any time only one of two forces u_x and u_ycan be applied to the base, the dynamics are captured in a highly under actuated switched system. The aim of this research activity is to build a spherical inverted pendulum and use switched controller to stabilize it.
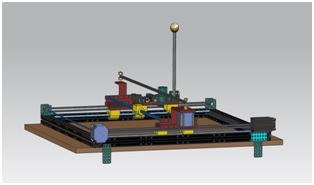
Fig.4 CAD model of a Spherical Inverted Pendulum
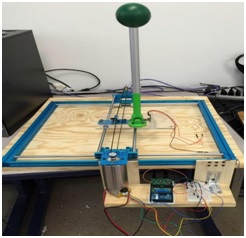
Fig.5 A physical Spherical Inverted Pendulum is being built
Research Facilities:
Speedgoat real-time target machine
Texas Instruments TMS320F28335 ezdsp system
Arduino Mega/Uno and accessories
Siemens NX 7.5
MATLAB/Simulink